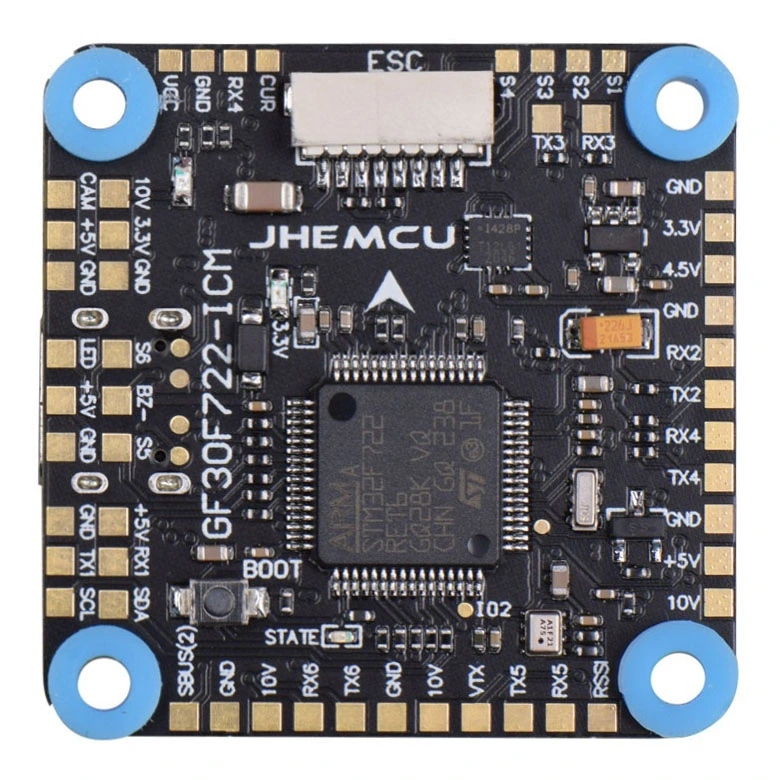
GF30F722-ICM — STM32F722
краткие пояснения по выводам данного полётного контроллера, исходя из обычных схем для полётных контроллеров на STM32F7 (GF30F722-ICM) и общих обозначений. Точные функции могут отличаться по ревизии платы, но это стандартные значения.
SMD 1428P
ICM-42688-P - это 6-осевой MEMS-модуль Устройство отслеживания движения, которое сочетает в себе 3-осевой гироскоп и 3-осевой акселерометр. Оно имеет настраиваемый интерфейс хоста, поддерживающий I3CSM.
Последовательная связь I2C и SPI обеспечивает 2 Кбайт памяти FIFO и 2 программируемых прерывания с поддержкой сверхнизкого энергопотребления при пробуждении по движению для минимизации энергопотребления системы.
ICM-42688-P поддерживает высокоточный внешний тактовый ввод, что помогает снизить погрешность чувствительности на системном уровне , улучшить измерение ориентации по данным гироскопа, снизить чувствительность ODR к температуре и изменениям от устройства к устройству. Устройство впервые в отрасли поддерживает 20-битный формат данных в формате FIFO для обеспечения высокого разрешения данных. Этот формат FIFO содержит 19-битные данные гироскопа и 18- битные данные акселерометра.
Другие передовые в отрасли функции включают Встроенный модуль обработки движений APEX от InvenSense для распознавания жестов, классификации активности и шагомера, а также программируемых цифровых фильтров и встроенного датчика температуры. Устройство поддерживает рабочий диапазон VDD от От 1,71 В до 3,6 В и отдельный источник цифрового ввода-вывода, VDDIO от 1,71 В до 3,6 В.
10V (несколько выводов)
Постоянный выход примерно +10 В — часто используется для питания FPV‑камеры или VTX через внешний регулятор/фильтр. Не подключать нагрузку до проверки напряжения мультиметром и полярности.
RSSI
Вход уровня сигнала приёма. Может принимать: аналог (0–3.3V), PWM или цифровой (uart/SBUS/CRSF) — зависит от прошивки/платы. Используется для отображения силы связи в OSD/телеметрии.
SDA и SDL
линии шины I2C, используемые для обмена данными и тактовым сигналом между контроллером (например, STM32F722) и внешними периферийными устройствами (датчиками, EEPROM, расширителями). В данном устройстве они позволяют подключать и управлять различными модулями через протокол I2C, обеспечивая передачу конфигурационных данных и считывание информации с внешних компонентов.
BZ‑
Общий/минус для зуммера (buzzer). Часто в паре с BZ+ (или BZ+ выведен отдельно/питание). Подключать активный/пассивный пищатель согласно полярности.
S1 — S6
Как правило, сигнальные выводы для AUX/каналов или портов для внешних переключателей/кнопок/сервоприводов — в зависимости от конфигурации платы они могут быть входами на 3.3V GPIO или PWM/PPM сигналами.
CAM
Триггер/питание для камеры (фото/видео). Может выдавать питание (5V/10V) или логический сигнал для спуска/переключения режима. Проверить мультиметром и документацию камеры перед подключением.
LED
Вывод(ы) для внешних индикаторов состояния (обычно управляющий сигнал и общая масса). Часто рассчитан на 5V/3.3V светодиоды через резистор на плате.
TX1–TX4 & RX1–RX4
Последовательные порты UART (TXn = передача, RXn = приём). Обычно используются так:
- TX1/RX1 — телеметрия/основной UART (иногда подключён к USB‑сим или внешнему телемодулю).
- TX2/RX2 — GPS (часто), телеметрия или SBUS/CRSF‑интерфейс.
- TX3/RX3 — VTX SmartAudio/IRC Tramp или внешние периферии.
- TX4/RX4 — дополнительный UART для OSD, модулей телеметрии, MSP или прошивки CLI.
Точные назначения зависят от прошивки (Betaflight/ArduPilot) и настроек; UARTs обычно работают на 3.3V логике.
LED (state)
Светодиод "state" — основной индикатор статуса контроллера: индикация питания, арм/дизарм, ошибки датчиков, режимов калибровки и состояния прошивки (частые мигания или цвета соответствуют статусам прошивки/Bootloader).
Вход/выход +3.3, +4.5, CUR и порт ESC
- +3.3 — стабилизированное питание логики; питание сенсоров и UART‑уровней. Не подавать выше 3.3V на входы логики.
- +4.5 — вероятно промежуточное напряжение (например, питание регулятора или питания аксессуаров). Может использоваться как источник для периферии; измерить перед подключением.
- CUR — вход/выход датчика тока (current sensor). Обычно это аналоговый выход шунта/AD для чтения потребляемого тока. Подключается к ADC MCU; ожидается сигнал пропорциональный току через шунт.
- PORT ESC — интерфейс для ESC: может быть PWM‑порты серв/ESC (традиционно 3.3–5V PWM) или один цифровой порт для DShot/OneShot/ProShot (также 3.3V логика). Некоторые платы имеют отдельный порта для коммутации питания ESC‑пакета или для провода telemetry от ESC.
Кратко — проверяй напряжения мультиметром, не подсовывай 5V логические сигналы в 3.3V входы, сверяй назначения UART в прошивке.